ARTICULOS DE REVISIÓN
REVISTA DE LA FACULTAD DE MEDICINA HUMANA 2019 - Universidad Ricardo PalmaDOI 10.25176/RFMH.v19i4.2349
INNOVACIONES INTERNACIONALES EN ROBÓTICA MÉDICA PARA MEJORAR EL MANEJO DEL PACIENTE EN PERU
INTERNATIONAL INNOVATIONS IN MEDICAL ROBOTICS TO IMPROVE THE PATIENT MANAGEMENT IN PERU
José Cornejo1,
Jorge A. Cornejo-Aguilar2,
J. Paul Perales-Villarroel, M.D.3,
1 MSc. Biomedical Eng. Program – VIU,
Valencian International University Surgical Engineering Society - CEO, Lima-Perú
2 Faculty of Human Medicine URP Surgical Engineering Society - VP, Lima-Perú
3 M.D. General Surgery Resident Kendall Regional Medical Center Miami, FL, United States
RESUMEN
Surgical Engineering Society realizó una investigación, la primera revisión como pioneros en LATAM, desde el año 2015, que desarrolla el tema de las últimas tecnologías de robótica médica creadas en América del Norte, Europa y Asia, que se importan para aplicarlas en el sistema de salud de Perú y América Latina Los sistemas robóticos para cirugía, rehabilitación y asistencia se presentan cubriendo la descripción del diseño del control y las especificaciones técnicas. Además, el manejo del paciente mediante robots se analiza con herramientas de diagnóstico, pronóstico y tratamiento. El proceso para evaluar los nuevos inventos de los dispositivos robóticos y llevarlo al mercado se introduce donde en las tres etapas que se muestran a continuación: innovación, asuntos regulatorios y aplicación biomédica. Además, hay un alto porcentaje de población con discapacidad en América Latina, por lo tanto, es necesario que más científicos biomédicos se especialicen en robótica para comenzar a desarrollar nuevas ideas y mejorar el manejo del paciente. Finalmente, las nuevas tecnologías creadas en América Latina deben ser asequibles, simples y eficientes para apoyar la situación económica de la atención médica en el continente y brindar los mejores estándares de calidad para mejorar los resultados del tratamiento en los pacientes.
Palabras Clave: Surgical Engineering Society, Robótica Médica, Sistema de Salud, Perú, América Latina, Cirugía, Rehabilitación, Asistencia, Manejo de Pacientes, Diagnóstico, Pronóstico, Tratamiento
El rápido progreso de la técnica robótica y la curva de aprendizaje en los procedimientos médicos ofrece nuevas oportunidades para la ingeniería biomédica y sanitaria 1.
La invención, la innovación en el desarrollo tecnológico no es una ciencia simple. La innovación en la asistencia sanitaria debe seguir evolucionando a medida que la tecnología y los recursos sean accesibles; sin embargo, la innovación realmente requiere cierto nivel de riesgo en el manejo del paciente porque es importante que el dispositivo robótico pueda cumplir con las expectativas del paciente. Es posible que los médicos y los centros médicos no se sientan cómodos con el mayor riesgo asociado con los dispositivos médicos innovadores; existen procedimientos bien establecidos para validar una nueva herramienta / dispositivo médico 2. Por lo tanto, los investigadores establecen algunos parámetros para realizar un proceso exitoso de investigación, desarrollo e innovación en el campo de la robótica médica, como se muestra en la Tabla I.
TABLA 1. Investigación, desarrollo e innovación
| Robótica Médica | ||||
| Aspectos de control | Posicionamiento | Orientación de Trayectorias | Control de la fuerza | |
| Ajuste | En el epacio | A tiempo | Dar forma | Al estado del paciente |
En América del Norte, Europa y Asia, la investigación en dispositivos y robótica médica está muy avanzada. En América Latina, el procedimiento de flujo para introducir un robot para aplicaciones quirúrgicas y de rehabilitación es el siguiente que se muestra en la Fig. 1. 2, donde se sugiere la información presentada para hacer más patentes en la industria de la salud.
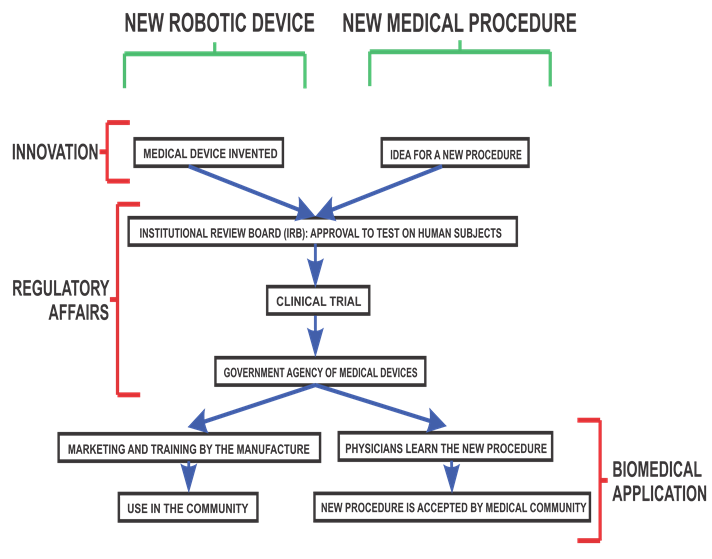
Fig. 1. Diagram of Medical Robotic Device and Procedure Innovation
La innovación internacional en un campo competitivo y en rápida evolución, como la cirugía, la rehabilitación y la asistencia, requieren que la comunidad esté dispuesta a cambiar la comodidad del procedimiento por la oportunidad de mejorar los resultados. Por lo tanto, los profesionales de la salud han estado apoyando en el diagnóstico, el pronóstico y el tratamiento con la aplicación de la robótica médica en algunas patologías con el fin de mejorar la esperanza de vida en la población mundial, por lo que en la Tabla II se adapta las herramientas más comunes para hacer una adecuada manipulación del paciente 3.
TABLA 2. El manejo del paciente.
| El manejo del paciente | Herramientas de preguntas |
| Diagnóstico | ¿¿Cómo podemos detectar la patología? |
| Pronóstico | ¿¿Cuáles son las implicaciones en la patología? |
| Tratamiento | ¿¿Qué podemos hacer sobre la patología? |
Todos los días, miles de pacientes se benefician de los dispositivos robóticos para cirugía o rehabilitación, algunos ejemplos se muestran en la Tabla III.
TABLA 3. Manejo de patología con robótica.
| Tecnología quirúrgica | Tecnología de rehabilitación | |
| Patología | Hernia | Parálisis de miembros inferiores parciales |
| Diagnóstico | Ultrasonido clínico / de tejidos blandos | Clínica / Electromiografía |
| Pronóstico | Favorable | Favorable |
| Tratamiento | Hernioplastia Robótica | Exoesqueleto para miembros inferiores |
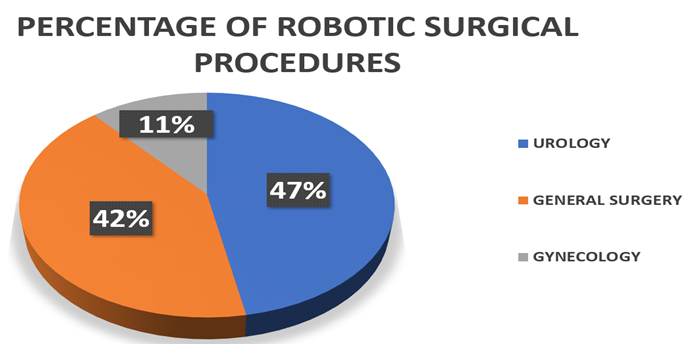
Fig. 2. Robotic Surgical Procedures in Mexico – da Vinci System ®
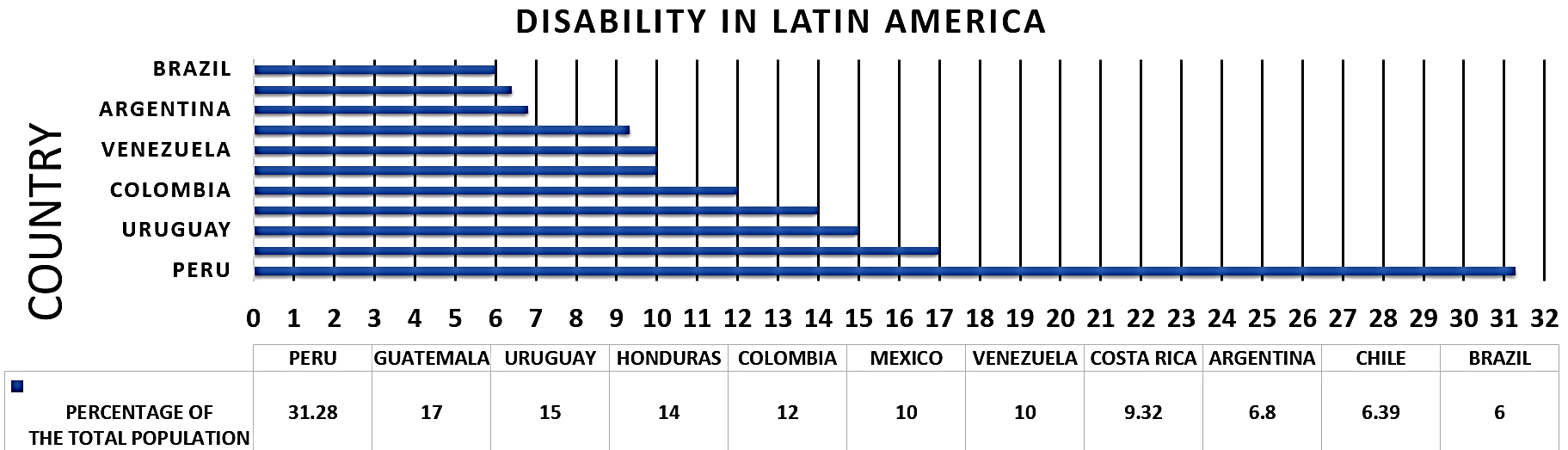
Fig. 3. Values of Percentage Disability in Latin America
A. Robótica Quirúrgica
Esta tecnología se enfoca en el área de aplicaciones mínimamente invasivas que se estableció a fines de la década de 1990, también tiene características ergonómicas y de teleoperación. Esos procedimientos quirúrgicos se han llevado a cabo en más de 3 millones de pacientes hasta la fecha8. La robótica quirúrgica ha recibido una gran atención por parte de los sistemas de salud en el mundo y la industria. Representa un cambio radical en el trabajo de la sala de operaciones, convirtiendo al robot en un miembro del equipo quirúrgico.
Cuando se considera al robot como otro miembro, el robot se percibe como un "cirujano robótico inteligente", con autonomía y capacidad de toma de decisiones. Sin embargo, es más preciso y más cercano a la realidad ver al robot quirúrgico como una "herramienta quirúrgica avanzada", es decir, como un dispositivo colocado en las manos del cirujano que le permite aumentar sus capacidades, hacerlo más preciso, mitigar los problemas de fatiga, mejorar la destreza, etc. De esta manera, la autonomía de los robots quirúrgicos está muy limitada a ciertas tareas específicas, mientras que la mayoría de las veces el robot es una herramienta que funciona bajo el esquema de control teleoperado9.
El diseño del robot quirúrgico debe incluir un análisis de riesgo10, porque el dispositivo tiene contacto con el humano durante la etapa de anestesia y podría ser peligroso. Además, en todo el mundo, para crear la ingeniería de control del sistema es común la aplicación del Diagrama de bloques como se muestra en la Fig. 4. 11, que brinda seguridad, precisión, comodidad y facilidad de uso para el cirujano.
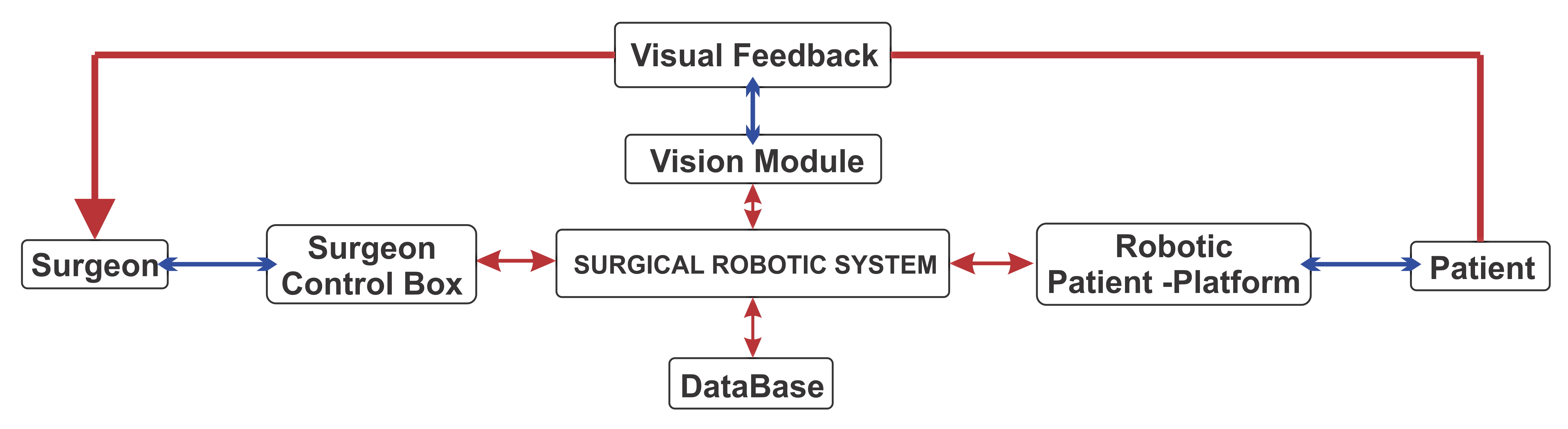
Fig. 4. Block Diagram of Surgical Robotic System – Control
Se podrían hacer diferentes clasificaciones de robots para cirugía, dependiendo de su esquema de control (autónomo o teleoperado), o su posición con respecto al paciente (robot montado en mesa o robot montado en paciente), o su arquitectura mecánica ( robot serie, robot paralelo o móvil)14.
En todo el mundo, el sistema de cirugía robótica más utilizado es el da Vinci®, tiene ventajas en comparación con la cirugía laparoscópica, como menos pérdida y necesidad de transfusión de sangre, menos dolor postoperatorio, hospitalizaciones y tiempos de recuperación más cortos; a expensas de tiempos de operación más largos y un costo más alto en comparación con la técnica laparoscópica15.
En América Latina, 2018, el país que tiene la mayoría de da Vinci System® es Brasil con 37 robots, y es importante presentar que Perú no tiene ningún sistema quirúrgico para aplicar en el sistema de salud15, así que a través de este artículo de investigación queremos alentar a importar la máquina quirúrgica con el propósito de mejorar el manejo del paciente para la cirugía, como se muestra en la Figura 5.
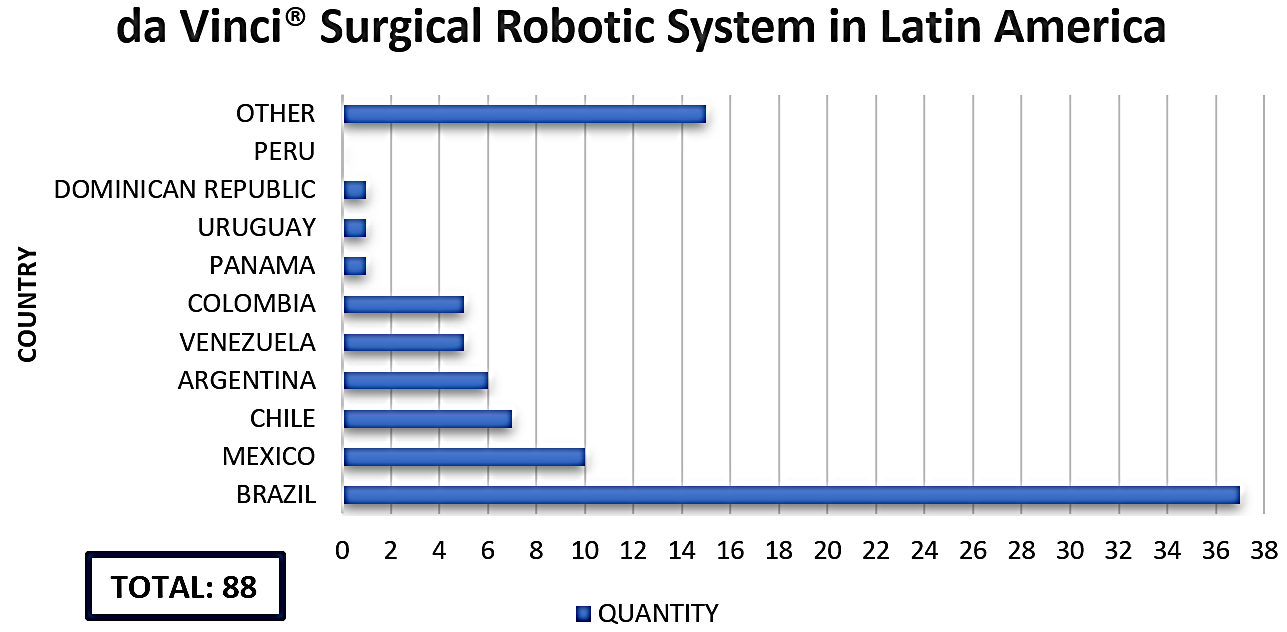
Fig. 5. Quantity of da Vinci ® Surgical Robotic System – Latin America
TABLA 4. Tecnología de robótica quirúrgica - sección anatómica.
| Anatomía | Empresas | |||
| Abdomen | Intuitive Surgical | TransEnterix | CMR Surgical | SS Innovations |
| Neuro | Medtronic | Synaptive | Zimmer | Monteris |
| Keep/Hip | Stryker/Mako | THINK Surgical | Smith & Nephew | Zimmer Biomet |
| ENT | Medrobotics | Intuitive Surgical | Medineering | Galen Robotics |
| Spine | Medtronic/Mazor | Globus Medical | Zimmer Biomet | NuVasive |
| Ojos | Consultores de Cambridge | Preceyes | ||
| Corazón | Stereotaxis | Heartlander Surgical | ||
| Livianos | J&J/Auris | Intuitive Surgical | ||
| Piel | Avra Medical Robotics | |||
| Uretra | Procept BioRobotics | |||

Fig. 6. Eng. José Cornejo and Biomedik Surgeon®
Esta tecnología es un campo interdisciplinario emergente donde la robótica, los sensores y la retroalimentación se utilizan de formas novedosas para reaprender, mejorar o restaurar los movimientos funcionales en humanos. Involucra el caminar, donde el sistema neuromuscular orquesta la marcha, la postura y el equilibrio, también afecciones como accidente cerebrovascular, déficit vestibular o vejez que deterioran esta importante actividad. Además, el entrenamiento robótico, la rehabilitación de la marcha y las ortesis cooperativas describen los trabajos actuales en el campo para abordar este problema, llevar la rehabilitación desde la clínica al entorno doméstico, de modo que estas ayudas médicas estén más fácilmente disponibles para los usuarios17.
La robótica de rehabilitación ofrece oportunidades considerables para mejorar la calidad de vida de las personas con discapacidad física, provocando movimientos pasivos repetitivos de la extremidad del paciente sostenido por el robot, sustituyendo o apoyando los movimientos realizados por el fisioterapeuta18. Entonces, la interfaz hombre-máquina alcanza su máximo exponente, una de estas tecnologías se llama Realidad Virtual, que permite al usuario interactuar y sumergirse en un entorno generado por computadora de forma natural19. Sin embargo, las terapias estándar proporcionan beneficios en términos de movilidad mejorada20.
En todo el mundo, los científicos han creado, utilizando ingeniería de control, un diseño estandarizado común del sistema utilizando el Diagrama de bloques, como se muestra en la Fig. 717, que es un sistema de circuito cerrado que combina la fuerza, la posición, la velocidad y la aceleración con sensores y actuadores acoplados a ortesis o prótesis, lo que ayuda a evaluar la evolución de la terapia en el paciente.
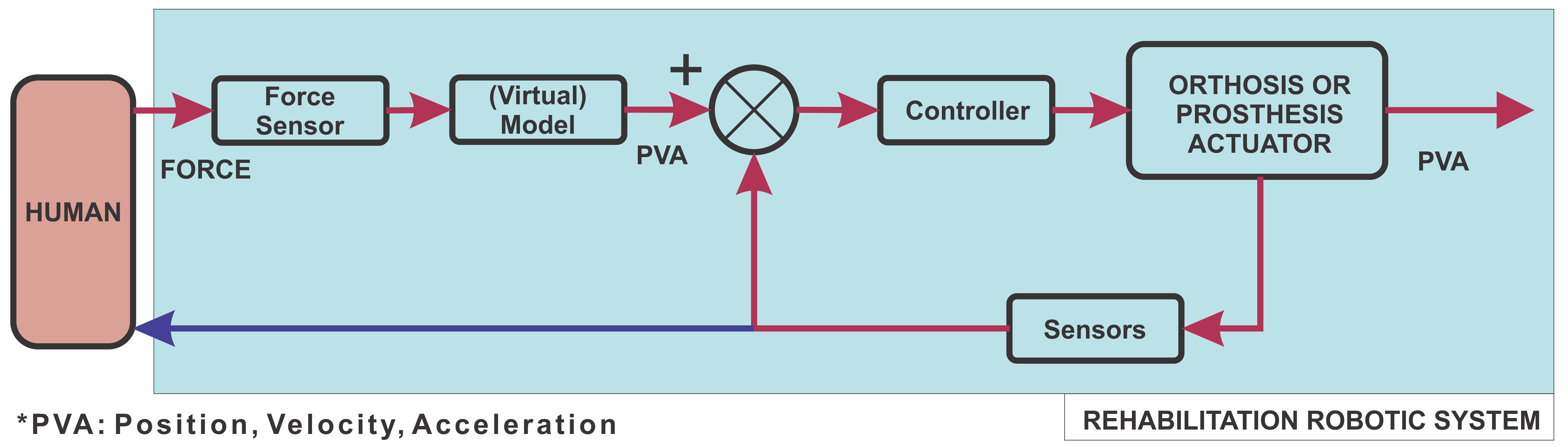
Fig. 7. Block Diagram of Rehabilitation Robotic System – Control
Existe otro concepto llamado Robótica Asistencial, que es un dispositivo tecnológico adaptativo que interactúa directamente con el usuario para mantener y / o aumentar las capacidades funcionales de las personas, a través de sensores, actuadores y procesamiento21, con el fin de apoyar al paciente en las áreas asociadas. con actividades psicomotoras de rutina con robots autónomos y robots cuyas funcionalidades son compartidas con el usuario, utilizadas con fines domésticos, de movilidad, hospitalidad y terapéuticos.
Diseñar una prótesis robótica y una ortesis requiere la combinación de mecatrónica, neurociencia, ingeniería eléctrica, ciencia cognitiva, procesamiento de señales, diseño de baterías, nanotecnología y ciencias de la conducta17, con el objetivo de mejorar el proceso de recuperación y facilitar la restauración del físico. funcionar mediante la entrega de entrenamiento de alta dosis y alta intensidad.22
A nivel internacional, hay algunos centros de tecnología médica que han creado robots de rehabilitación para mejorar la calidad de vida de los pacientes que han sufrido daños en su sistema nervioso-motor-neurológico23, esa descripción se muestra en la Tabla V.
TABLA 5. Tecnología de rehabilitación y robótica asistiva.
|
Robot |
Description |
|
MySpoon |
Permita comer con la mínima ayuda del cuidador |
|
MIT Manus |
Para terapia física de víctimas de derrame cerebral |
|
ARMin |
Dispositivo exoesquelético unido al brazo |
|
Anklebot |
Dispositivo exoesquelético unido a la pierna |
|
GENTLE/s |
Asistencia robótica en rehabilitación neurológica y motora |

Fig. 8. Biom3D ®, Manos en Acción – Arm Prosthesis
El uso de la robótica médica para la salud es muy importante para poder apoyar la atención médica del paciente y controlar la patología utilizando un diagnóstico, un pronóstico y un tratamiento de alto nivel sobresalientes con la finalidad de obtener una recuperación exitosa.
La cirugía, la rehabilitación y la asistencia son las principales áreas de aplicación de la robótica en la asistencia sanitaria. Recientemente, aproximadamente en los últimos 15 años, América Latina tiene acceso para importar las últimas tecnologías desarrolladas en América del Norte, Europa y Asia. Sin embargo, es importante que los países de esta parte del continente comiencen a invertir en las nuevas tecnologías médicas asequibles y eficientes para establecer nuevas formas de dar una mejor calidad de vida a la población.
Los deberes del ingeniero biomédico con especialización en robótica médica son tan importantes e indispensables porque impulsan las herramientas más efectivas para analizar los requisitos médicos propuestos por los profesionales de la salud de acuerdo con las necesidades del paciente, y también pueden trabajar como un equipo quirúrgico mejorando los resultados de salud y mejorando la seguridad del paciente.
Contribuciones de autoría: Los autores participaron
en la génesis de la idea, diseño de proyecto, recolección,
análisis de la información y preparación del manuscrito
del presente trabajo de investigación.
Fuentes de financiamiento: Autofinanciado
Conflictos de interés: Los autores declaran no tener
conflicto de interés en la publicación de este artículo.
Correspondencia: Jorge A. Cornejo Aguilar
Dirección: Calle Galicia 369. Lima, Perú.
Teléfono: +51 993519893
Correo electrónico: jcornejo_17@ieee.org
REFERENCIAS BIBLIOGRÁFICAS
