ARTICULOS DE REVISIÓN
REVISTA DE LA FACULTAD DE MEDICINA HUMANA 2019 - Universidad Ricardo PalmaDOI 10.25176/RFMH.v19i4.2349
INTERNATIONAL INNOVATIONS IN MEDICAL ROBOTICS TO IMPROVE THE PATIENT MANAGEMENT IN PERU
INNOVACIONES INTERNACIONALES EN ROBÓTICA MÉDICA PARA MEJORAR EL MANEJO DEL PACIENTE EN PERU
José Cornejo1,
Jorge A. Cornejo-Aguilar2,
J. Paul Perales-Villarroel, M.D.3,
1 MSc. Biomedical Eng. Program – VIU,
Valencian International University Surgical Engineering Society - CEO, Lima-Perú
2 Faculty of Human Medicine URP Surgical Engineering Society - VP, Lima-Perú
3 M.D. General Surgery Resident Kendall Regional Medical Center Miami, FL, United States
ABSTRACT:
Objectives: Surgical Engineering Society conducted a research, the First Review as the pioneers in LATAM, since year 2015, which develops the topic of the latest Medical Robotics technologies created in North América, Europe and Asia, which are imported to apply in the Healthcare System of Peru and Latin America. The robotic systems for surgery, rehabilitation and assistance are presented covering the description of control design and technical specifications. Besides, the patient management using robots is analyzed with diagnosis, prognosis and treatment tools. The process to evaluate the new inventions of robotic devices and bring to the market is introduced where three stages are shown as the following: innovation, regulatory affairs and biomedical application. Moreover, there is a high percentage of population with disability in Latin America, therefore, it is necessary that more biomedical scientists be specialized in robotics to start developing new ideas to improve the patient management. Finally, the new technologies created in Latin America must be affordable, simply and efficient in order to support the healthcare economic situation in the continent and give the best quality standards to improve treatment outcomes on patients.
Keywords: Surgical Engineering Society, Medical Robotics, Healthcare System, Peru, Latin America, Surgery, Rehabilitation, Assistance, Patient Management, Diagnosis, Prognosis, Treatment
Surgical Engineering Society realizó una investigación, la primera revisión como pioneros en LATAM, desde el año 2015, que desarrolla el tema de las últimas tecnologías de robótica médica creadas en América del Norte, Europa y Asia, que se importan para aplicarlas en el sistema de salud de Perú y América Latina Los sistemas robóticos para cirugía, rehabilitación y asistencia se presentan cubriendo la descripción del diseño del control y las especificaciones técnicas. Además, el manejo del paciente mediante robots se analiza con herramientas de diagnóstico, pronóstico y tratamiento. El proceso para evaluar los nuevos inventos de los dispositivos robóticos y llevarlo al mercado se introduce donde en las tres etapas que se muestran a continuación: innovación, asuntos regulatorios y aplicación biomédica. Además, hay un alto porcentaje de población con discapacidad en América Latina, por lo tanto, es necesario que más científicos biomédicos se especialicen en robótica para comenzar a desarrollar nuevas ideas y mejorar el manejo del paciente. Finalmente, las nuevas tecnologías creadas en América Latina deben ser asequibles, simples y eficientes para apoyar la situación económica de la atención médica en el continente y brindar los mejores estándares de calidad para mejorar los resultados del tratamiento en los pacientes.
Palabras Clave: Surgical Engineering Society, Robótica Médica, Sistema de Salud, Perú, América Latina, Cirugía, Rehabilitación, Asistencia, Manejo de Pacientes, Diagnóstico, Pronóstico, Tratamiento
The fast progress of robotic technique and learning curve in medical procedures provides new opportunities for the biomedical and healthcare engineering1.
Invention, innovation in technology development are not a simple science. The innovation in healthcare must continue to evolve as technology and resources become accessible; however, innovation really requires some level of risk in patient management because it is important that the robotic device could fulfilled the patient expectancies. Physicians and Medical Centers may not be comfortable with the increased risk associated with innovative medical devices, there are well established procedures to validate a new medical tool / device 2. Therefore, the researchers state some parameters to make a successful research, development and innovation process in the field of medical robotics, as shown in Table I.
TABLE 1. RESEARCH, DEVELOPMENT AND INNOVATION (R+D+I)
| Medical Robotics | ||||
| Control Aspects | Positioning | Trajectories Guidance | Force Control | |
| Adjusting | In Space | In Time | To Shape | To Patient Status |
In North America, Europe and Asia, the research in medical robotics and devices is highly advanced. In Latin America, the flow procedure to introduce a robot for surgical and rehabilitation application is the following shown in Fig. 1. 2, where the information presented is suggested to make more patents in the healthcare industry.
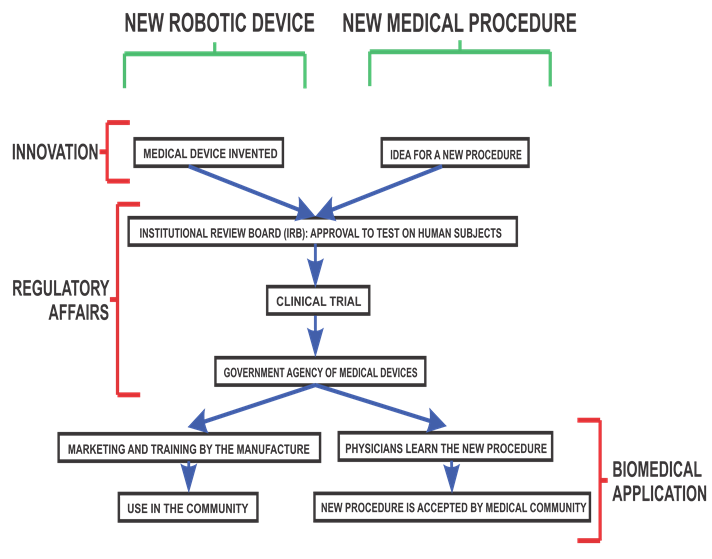
Fig. 1. Diagram of Medical Robotic Device and Procedure Innovation
The international innovation in a competitive and rapidly evolving field, such as surgery, rehabilitation and assistance, requires that the community be willing to trade off procedural comfort for the chance to improve outcomes. Therefore, the Healthcare Professionals have been supporting in diagnosis, prognosis and treatment with the application of medical robotics in some pathologies in order to improve the life expectancy in the worldwide population, so in the Table II is shown the most common tools to make an appropriate patient management3.
TABLE 2. PATIENT MANAGEMENT
| Patient Management | Question Tools |
| Diagnosis | ¿How can we detect the pathology? |
| Prognosis | ¿What are the implications in the pathology? |
| Treatment | ¿What can we do about the pathology? |
Everyday, thousands of patients benefit from robotic devices for either surgery or rehabilitation, examples are shown in the Table III.
TABLE 3. PATHOLOGY MANAGEMENT WITH ROBOTICS
| Surgical Tech | Rehabilitation Tech | |
| Pathology | Hernia | Partial lower limbs Palsy |
| Diagnosis | Clinical / Soft Tissue Ultrasound | Clinical / Electromyography |
| Prognosis | Favorable | Favorable |
| Treatment | Robotic Hernioplasty | Exoskeletal for lower limbs |
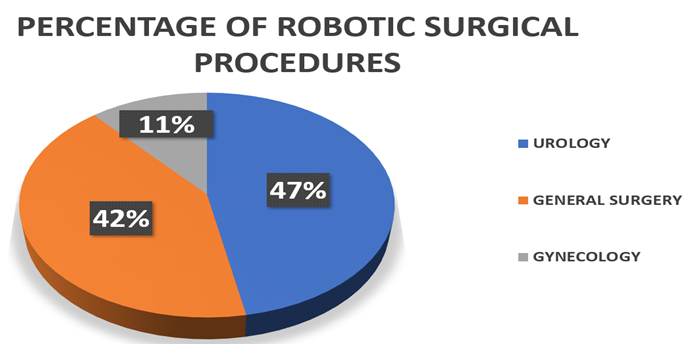
Fig. 2. Robotic Surgical Procedures in Mexico – da Vinci System ®
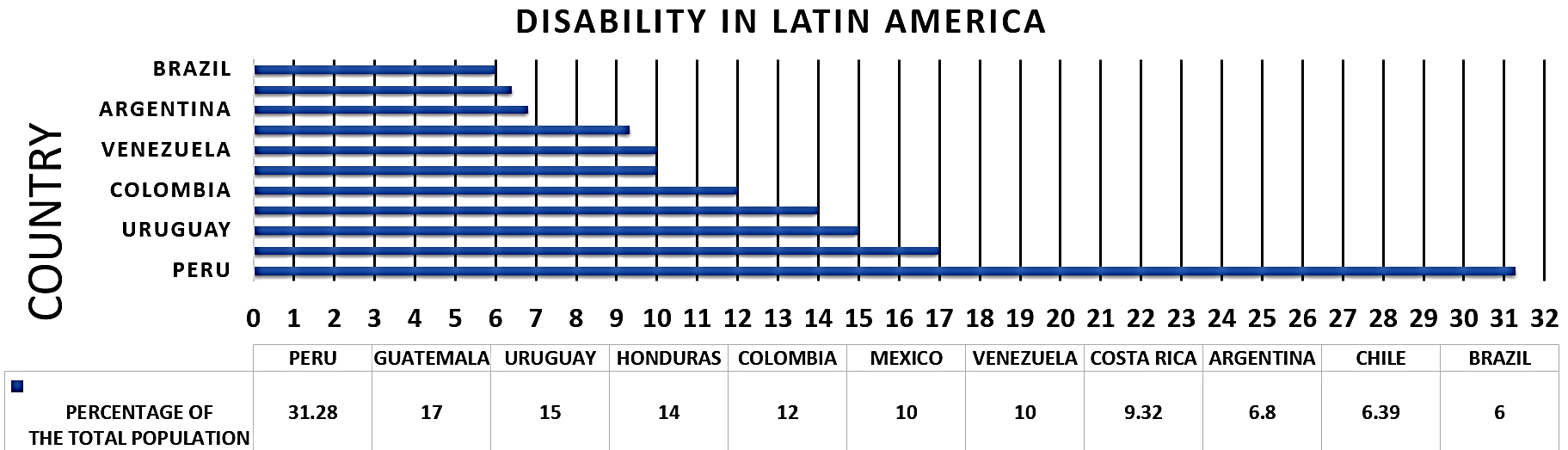
Fig. 3. Values of Percentage Disability in Latin America
A. Surgical Robotics
This technology is focuses on the area of minimally invasive applications that was established in the late 1990s, also it has teleoperated and ergonomic features. Those surgical procedures have been conducted on over 3 million patients to date8. Surgical robotics have been receiving a wide significant attention from healthcare systems in the world and industry. It represents a radical change in the work of the operating room, turning the robot into a member of the surgical team.
When considering the robot as another member, the robot is perceived as an "intelligent robotic surgeon", with autonomy and decision-making capacity. However, it is more accurate, and closer to reality, to see the surgical robot as an "advanced surgical tool", that is, as a device placed in the hands of the surgeon that allows it to increase its capabilities, make it more precise, mitigate the fatigue problems, improve dexterity, etc. In this way the autonomy of surgical robots is very limited to certain specific tasks, while most of the time the robot is a tool that works under the tele-operated control scheme9.
The design of surgical robot should include a risk analysis 10, because the device has contact with the human during the anesthesia stage and could be hazardous. Besides, around the world, to create the control engineering of the system is common the application of the Block Diagram as shown in Fig. 4.11, which gives security, accuracy, comfort and usability to the surgeon.
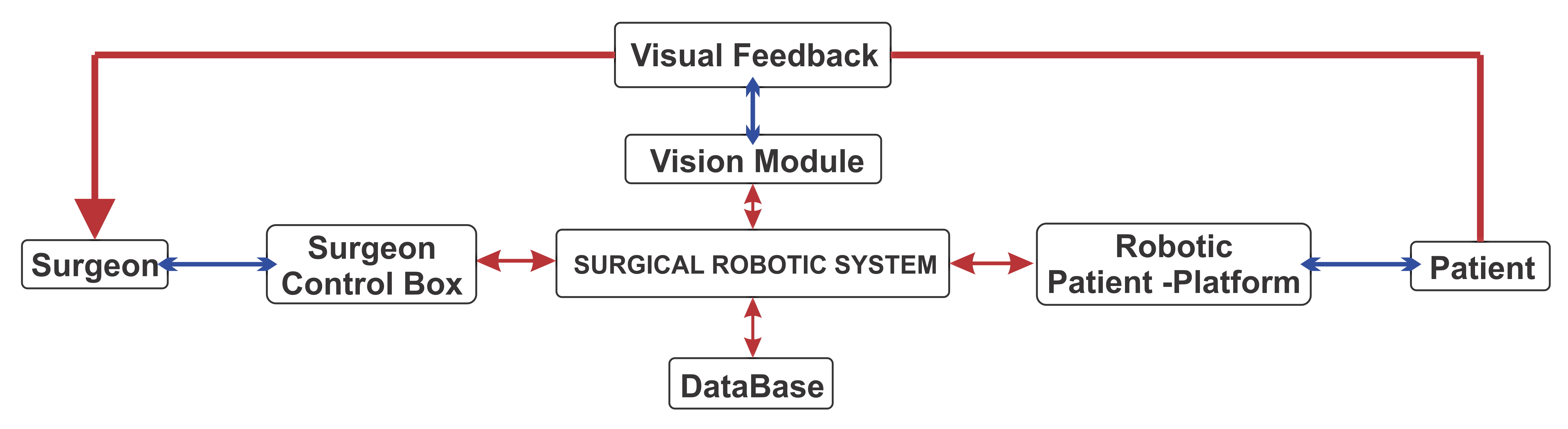
Fig. 4. Block Diagram of Surgical Robotic System – Control
Different classifications of robots could be made for surgery, depending on their control scheme (autonomous or tele-operated), or their position with respect to the patient (table-mounted-robot or patient-mounted-robot), or their mechanical architecture (serial robot, parallel or mobile robot)14.
Worldwide, the most used robotic surgery system is the da Vinci®, it has advantages compared to laparoscopic surgery such as less loss and requirement of blood transfusion, less postoperative pain, hospital stays and shorter recovery times; at the expense of longer operative times and a higher cost compared with the laparoscopic technique15.
In Latin America, 2018, the country which has the majority of da Vinci System® is Brazil with 37 robots, and is important to present that Peru does not have any surgical system to apply in healthcare system15, so through this research article we want to encourage to import the surgical machine to the purpose of improve the patient management of the patient for surgery, as shown in Fig. 5.
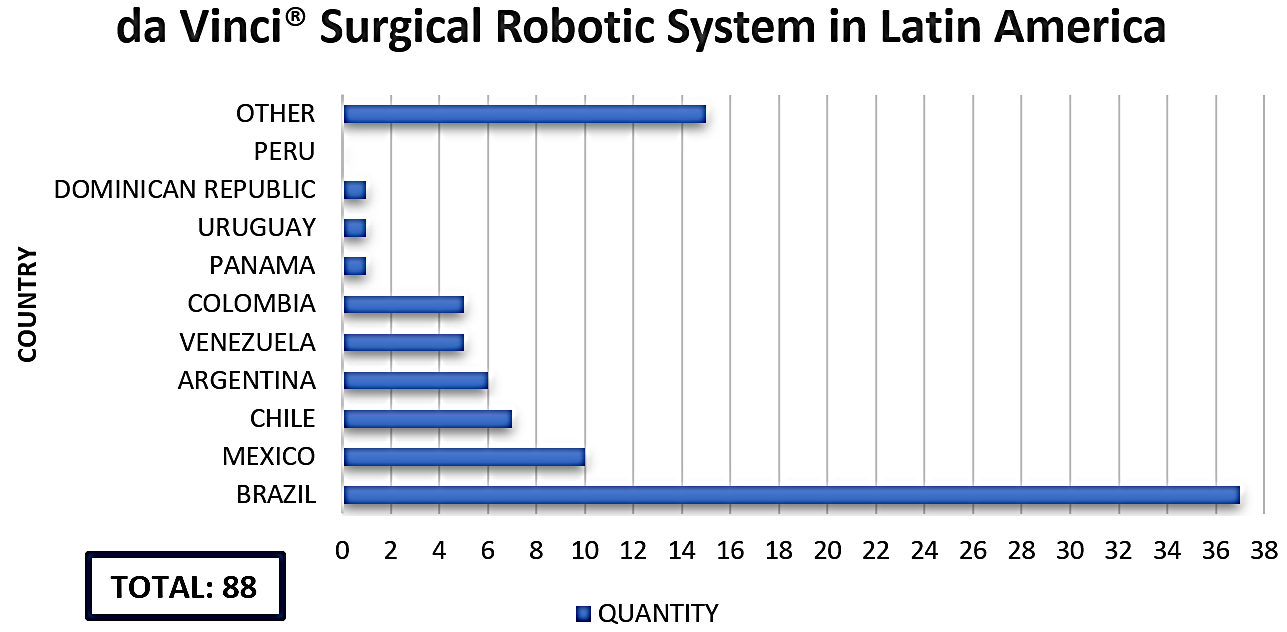
Fig. 5. Quantity of da Vinci ® Surgical Robotic System – Latin America
TABLE 4. SURGICAL ROBOTICS TECH - ANATOMICAL SECTION
| Anatomy | Companies | |||
| Abdomen | Intuitive Surgical | TransEnterix | CMR Surgical | SS Innovations |
| Neuro | Medtronic | Synaptive | Zimmer | Monteris |
| Keep/Hip | Stryker/Mako | THINK Surgical | Smith & Nephew | Zimmer Biomet |
| ENT | Medrobotics | Intuitive Surgical | Medineering | Galen Robotics |
| Spine | Medtronic/Mazor | Globus Medical | Zimmer Biomet | NuVasive |
| Eyes | Cambridge Consultants | Preceyes | ||
| Heart | Stereotaxis | Heartlander Surgical | ||
| Lungs | J&J/Auris | Intuitive Surgical | ||
| Skin | Avra Medical Robotics | |||
| Urethra | Procept BioRobotics | |||

Fig. 6. Eng. José Cornejo and Biomedik Surgeon®
This technology is an emerging interdisciplinary field where robotics, sensors, and feedback are used in novel ways to relearn, improve, or restore functional movements in humans. It covers walking, where the neuromuscular system orchestrates the gait, posture, and balance, also conditions such as stroke, vestibular deficits, or old age impair this important activity. Besides, robotic training, gait rehabilitation, and cooperative orthoses describe the current works in the field to address this issue, bring rehabilitation out from the clinic into the home environment, so that these medical aids are more readily available to users17.
Rehabilitation robotics provide considerable opportunities to improve the quality of life for physically disabled people causing passive repetitive movements of the limb of the patient held by the robot, substituting or supporting the movements performed by the physiotherapist18. So, the human-machine interface reaches its highest exponent, one these technologies are called Virtual Reality, that allows the user to interact and submerge in a computer-generated environment in a natural way19. However, standard therapies provide only modest benefits in terms of improved mobility20.
Worldwide, the scientists have created, using control engineering, a common standardized design of the system using the Block Diagram, as shown in Fig. 717, which is a closed loop system that combines the force, position, velocity and acceleration with sensors and actuators coupled to orthosis or prosthesis, helping in this way to evaluate the evolution of the therapy on the patient.
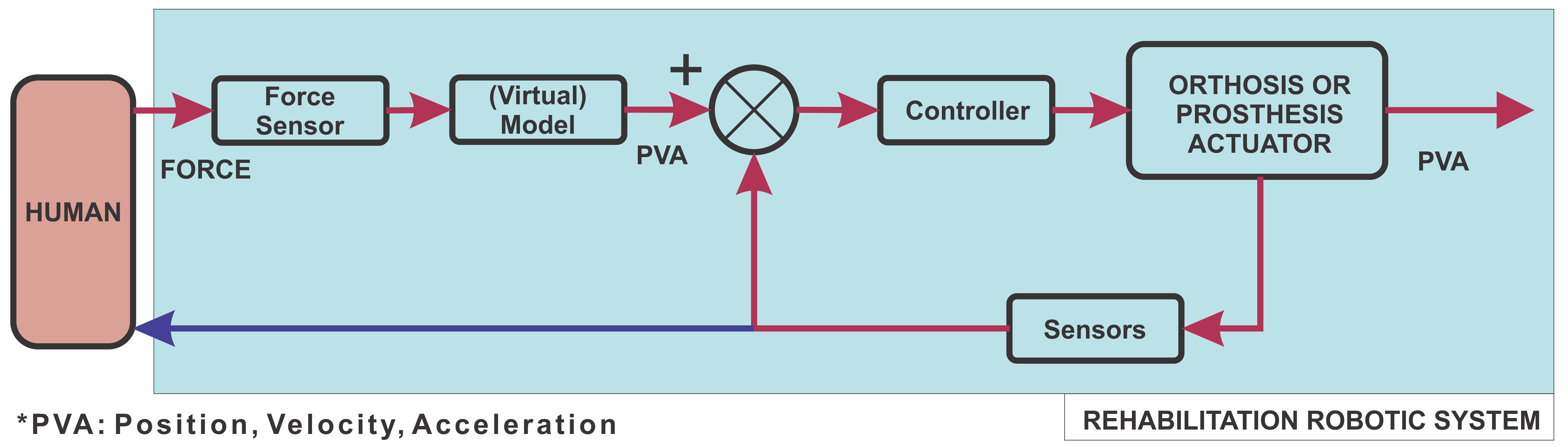
Fig. 7. Block Diagram of Rehabilitation Robotic System – Control
There is other concept called Assistive Robotics which is an adaptive technological device that interacts directly with the user to maintain and / or increase the functional capabilities of people, through sensors, actuators and processing21, in order to support the patient in areas associated with psychomotor routine activities with autonomous robots and robots whose functionalities are shared with the user, used in domestic, mobility, hospitality and therapeutic purposes.
Design a robotic prosthesis and orthosis requires the combination of mechatronics, neuroscience, electrical engineering, cognitive science, signal processing, battery design, nano-technology and behavioral science17, with the objective to enhance the recovery process and facilitate the restoration of physical function by delivering high-dose and high-intensity training.22
Internationally, there are some med tech hubs which have created rehabilitation robots in order to improve the quality of life for patients who have suffered damage to their nervous-motor-neurological system23, that description is shown in Table V.
TABLE 5. REHABILITATION AND ASSISTIVE ROBOTICS TECH
|
Robot |
Description |
|
MySpoon |
Allow eating with only minimal help from caregiver |
|
MIT Manus |
For physical therapy of stroke victims |
|
ARMin |
Exoskeletal Device attached to the arm |
|
Anklebot |
Exoskeletal Device attached to the leg |
|
GENTLE/s |
Robotic Assistance in Neuro and Motor Rehabilitation |

Fig. 8. Biom3D ®, Manos en Acción – Arm Prosthesis
The use of medical robotics for health is very important to be able to support the patient healthcare for control the pathology using an outstanding high-level diagnosis, prognosis and treatment in order to obtain a successful recovery.
Surgery, Rehabilitation and Assistance are the main areas of robotics application in healthcare. Recently, in the last 15 years, Latin America is having access to import those latest technologies developed in North America, Europe and Asia, because there are only often innovation centers which are researching in this field. However, it is important that the countries in this part of the continent start to invest in the new affordable and efficient medical technologies in order to state new ways to give a best quality of life to the population.
The duties of the Biomedical Engineer with specialization in medical robotics are so important and indispensable because they drive the most effective tools to analyses the medical requirements proposed by the health professionals according to the patient needs, and also, they can work as a multidisciplinary team care, improving health outcomes and enhancing satisfaction of the stakeholders.
Authorship contributions: The authors participated
in the genesis of the idea, project design, collection,
information analysis and manuscript preparation
of this research paper.
Financing: Self-financed
Conflicts of interest: The authors declare no
conflict of interest in the publication of this article.
Correspondence: Jorge A. Cornejo Aguilar
Address: Calle Galicia 369. Lima, Peru.
Telephone: +51 993519893
E-mail: jcornejo_17@ieee.org
BIBLIOGRAPHIC REFERENCES
