ARTICULO ORIGINAL
REVISTA DE LA FACULTAD DE MEDICINA HUMANA 2024 - Universidad Ricardo Palma10.25176/RFMH.v24i2.6550
EVALUACIÓN ANTROPOMÉTRICA BIOMÉDICA Y DISEÑO MECÁNICO CONCEPTUAL DE UN SISTEMA ROBÓTICO PARA LA REHABILITACIÓN PASIVA DE MIEMBROS INFERIORES EN PACIENTES POST-ACCIDENTE CEREBROVASCULAR
BIOMEDICAL ANTHROPOMETRIC EVALUATION AND CONCEPTUAL MECHANICAL DESIGN OF ROBOTIC SYSTEM FOR LOWER LIMBS PASSIVE-REHABILITATION ON POST-STROKE PATIENTS
Cesar Martel Cervantes
 1
1
Carol Sandoval
1
Ricardo Palomares
1
Jeanette Borja Arroyo
2
Margarita Murillo Manrique
1
Jose Cornejo
1
1 Grupo de Investigación en Robótica y Mecatrónica Avanzada (GI-ROMA), Universidad Ricardo Palma,
Lima, Perú.
2 Hospital Edgardo Rebagliati Martins, Lima, Perú.
RESUMEN
Antecedentes: El accidente cerebrovascular (ACV) es una de las principales causas de discapacidad
permanente, ya que puede provocar lesiones cerebrales graves con secuelas físicas significativas,
limitando la capacidad de realizar actividades diarias.
Objetivo: Esta investigación tuvo como objetivo diseñar un sistema robótico de movimiento
pasivo-continuo para la rehabilitación de miembros inferiores en pacientes adultos con ACV, mejorando
así las probabilidades de recuperación de su movilidad de marcha.
Metodología: Se llevó a cabo el modelado y simulación del sistema robótico mediante Diseño
Asistido por Computadora (CAD), utilizando el software de ingeniería Autodesk Inventor Professional
2023.
Resultados: Se obtuvieron las posiciones iniciales y finales del sistema robótico, así como la
simulación de movimiento pasivo-continuo.
Conclusiones: La toma de medidas precisas de un paciente maximiza la posibilidad de implementar
un prototipo funcional que contribuya en el proceso de rehabilitación.
Palabras clave: robótica, rehabilitación, miembros inferiores, diseño, accidente cerebro
vascular, simulación.
(fuente: DeCS- BIREME)
ABSTRACT
Background: Cerebrovascular accident (CVA) is one of the main causes of permanent disability, as
it can cause serious brain injuries with significant physical consequences, limiting the ability to
perform daily activities.
Objective: This research aimed to design a robotic system of passive-continuous movement for the
rehabilitation of lower limbs in adult patients with stroke, thus improving the chances of recovery of
their walking mobility.
Methodology: Modeling and simulation of the robotic system using Computer Aided Design (CAD),
using the engineering software Autodesk Inventor Professional 2023.
Results: The initial and final positions of the robotic system were obtained, as well as the
simulation of passive-continuous movement.
Conclusions: Taking precise measurements of a patient maximizes the possibility of implementing a
functional prototype that contributes to the rehabilitation process.
Keywords: robotics, rehabilitation, lower limbs, design, cerebrovascular accident, simulation
(source: MeSH NLM)
INTRODUCCIÓN
En el Perú, según la Encuesta Especializada sobre discapacidad realizada en el año 2017 por el Instituto
Nacional de Estadística e Informática (INEI), el 10.3% de la población es decir, aproximadamente 3
millones 209 mil 261 personas, tiene alguna discapacidad (1). De los cuales
se registró un total de 10 570 casos de pacientes con accidente cerebro vascular, (2) Se estima que el 60% de personas hospitalizadas por ACV padecen de
secuelas discapacitantes y solo el 20% de los afectados completan programas de rehabilitación física
(3). Según el INEI de 2019, el 88.6% de la población total con algún tipo de
discapacidad no recibió tratamiento ni terapia de rehabilitación, mientras que solo el 11.4% logró
acceder a algún tipo de atención en este sentido (4). Esta disparidad puede
atribuirse, en parte, a la carencia de utilización de equipos tecnológicos de rehabilitación en el Perú,
debido a factores económicos y a la falta de conocimiento sobre la existencia de estos dispositivos como
parte de las terapias de rehabilitación física.
El accidente cerebrovascular (ACV) puede prevenirse llevando una vida saludable y en caso de ocurrir,
puede tratarse efectivamente si el paciente es llevado a emergencias de un hospital lo antes posible
tras presentar los primeros signos, momento en el cual las probabilidades de recuperación son altas
(5). Por los motivos antes mencionados, se propone el diseño de un sistema
robótico de movimiento pasivo-continuo para la rehabilitación de miembros inferiores en pacientes
adultos afectados por ACV. Este sistema busca facilitar y maximizar la recuperación de las funciones
motoras de las extremidades inferiores, tanto en el hogar como en centros hospitalarios, con monitoreo y
seguimiento por parte del médico rehabilitador. En la actualidad se han desarrollado diversos estudios
para dar solución a los diversos problemas de movilidad de los miembros inferiores, entre ellos por
ejemplo el desarrollo de sistemas para asistencia en marcha (6), tratamiento
de discapacidades motoras causadas por parálisis cerebral (7) y desarrollo
de aplicaciones de control para sistemas exoesqueléticos (8). No obstante,
los primeros modelos de exoesqueletos surgieron en la década de 1960 en los laboratorios de la
Universidad de Cornell (9).
La estructura de Yang representa uno de los primeros intentos documentados con características
exoesqueléticas, cuyo objetivo primordial era aumentar la potencia en el ritmo de la caminata, así como
en los saltos (10). Otra versión de este tipo de exoesqueleto fue
implementada con motores de corriente continua. Sin embargo, el motor, el sistema de alimentación
(batería) y la tecnología computacional de la época limitaban en gran medida la portabilidad del
dispositivo (11).
En España, en la Universidad Politécnica de Catalunya, se presentó un diseño de ortesis activa
rodilla-tobillo (12). Este proyecto se enfoca en asistencia y la
recuperación de pacientes con lesión medular, cuya condición suele dejarles sin movilidad en
aproximadamente un 80% de su cuerpo. En Latinoamérica, se han desarrollado exoesqueletos destinados a la
rehabilitación de brazos como de piernas. En el ámbito de la rehabilitación de brazos, por ejemplo, se
han realizado avances con exoesqueletos que ofrecen hasta cuatro grados de libertad, adaptados a la
antropometría de pacientes mexicanos mediante un diseño conceptual óptimo (13). Estos exoesqueletos enfocados al movimiento de rotación del húmero,
flexión y extensión del codo (14), pronación y supinación de la mano
(15). En el caso de la rehabilitación de la pierna, se han desarrollado
sistemas con dos grados de libertad para terapias en tobillo y rodilla, que incluyen el uso de sensores
de fuerza, velocidad y posición (16), así como diseños exclusivos para la
flexión-extensión de la rodilla (17). En este sentido, la aplicación de la
tecnología en la rehabilitación física mejora la independencia del paciente a la hora de acudir a sus
terapias, como demuestra la investigación (18).
En conclusión, el desarrollo del proyecto representa un avance significativo en la implementación de
equipos de rehabilitación que mejoran la condición física de pacientes con limitaciones de marcha debido
a un accidente cerebrovascular, permitiéndoles ser más independientes en sus actividades diarias. En el
futuro, el objetivo de la investigación es implementar el sistema robótico de miembros inferiores,
brindando a los pacientes la oportunidad de recuperar un componente esencial de su función y autonomía
bajo la supervisión del médico rehabilitador.
METODOLOGÍA
2.1. Análisis biomecánico de miembros inferiores
El presente proyecto se enfoca en el análisis biomecánico de las extremidades inferiores que comprende
la rodilla y pie como se muestra en la Figura 1, con el propósito de diseñar un sistema robótico para la
rehabilitación de pacientes con accidente cerebrovascular (ACV). Se examinan los movimientos y funciones
de las articulaciones en diferentes contextos para identificar las necesidades específicas de
rehabilitación. Los factores biomecánicos críticos a considerar en el diseño de un exoesqueleto son los
grados de libertad y los movimientos (19), los cuales son fundamentales
para el desarrollo del modelado asistido por computadora CAD que facilite la recuperación de la función
motora en pacientes que han experimentado un ACV.
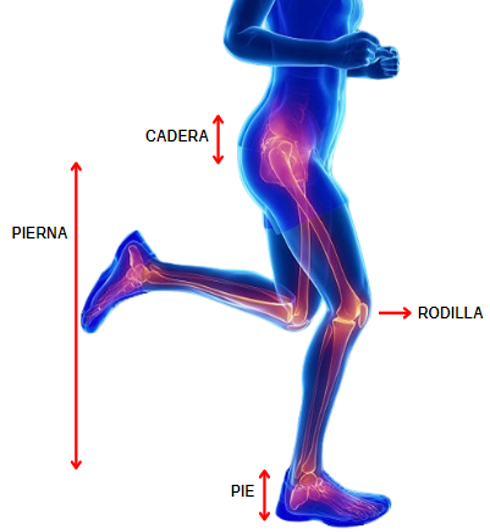
Figura 1. Anatomía del miembro inferior.
Fuente: Adaptado de https://www.goconqr.com/es/p/26439765?dont_count=true&frame=true&fs=true
Se ilustran las articulaciones del miembro inferior, incluyendo la cadera, la rodilla y el tobillo
(20), representadas por círculos rojos. Las líneas conectan estas
articulaciones, mostrando las trayectorias de movimiento durante el proceso de rehabilitación (21). Se observa cómo el diseño del sistema permite la realización de
movimientos multidireccionales y ajustes personalizados, ofreciendo una amplia gama de ejercicios para
mejorar la movilidad y la fuerza muscular en pacientes con disfunción en las extremidades inferiores
como se muestra en la Figura 2.
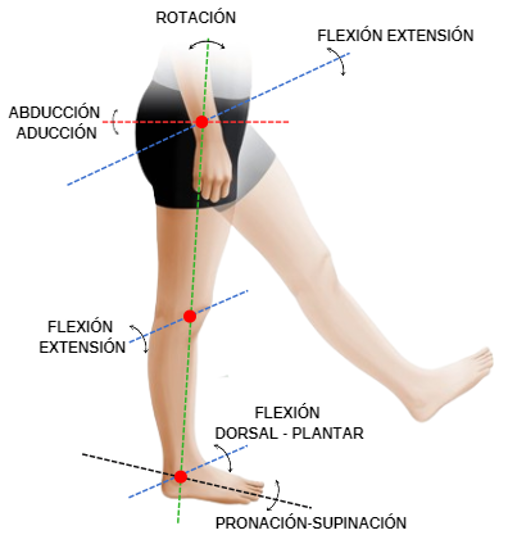
Figura 2. Movimiento de articulaciones del miembro inferior.
Fuente: Adaptado de https://www.kenhub.com/es/library/anatomia-es/tipos-de-movimientos-del-cuerpo-humano
Según la Tabla 1, los grados de movimiento biomecánico en las articulaciones de la rodilla y el tobillo
(22) permite diseñar sistemas robóticos de rehabilitación que pueden
proporcionar terapias personalizadas y específicas para cada paciente. La capacidad de ajustar la
resistencia y la velocidad del movimiento en función de las necesidades individuales de cada paciente
(23) resulta fundamental para optimizar los resultados de rehabilitación y
promover una recuperación efectiva de la función motora en los miembros inferiores.
|
Articulación |
Movimiento |
Grados |
|||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
|
Rodilla |
Extensión - flexión |
0° a 120° |
|||||||||
|
Tobillo |
Flexión plantar - dorsal |
-40° a 20° |
|||||||||
|
Supinación - Pronación |
-35° a 15° |
Fuente: Tomado de “Biomecánica básica del sistema musculoesquelético” (Nordin, 2004).
Se realizó la medición del miembro inferior dividiéndolo en L1, L2 y L3 como se muestra en la Figura 3,
esto se basa en la anatomía y las proporciones individuales del paciente (24), la correcta implementación de estas mediciones antropométricas
garantiza una adecuada alineación biomecánica y una distribución equilibrada de las cargas durante el
proceso de rehabilitación, lo que es esencial para maximizar la eficacia y la seguridad del tratamiento.
Esto permite ajustar de manera óptima para realizar el prototipo del diseño CAD del sistema robótico de
rehabilitación de miembros inferiores.
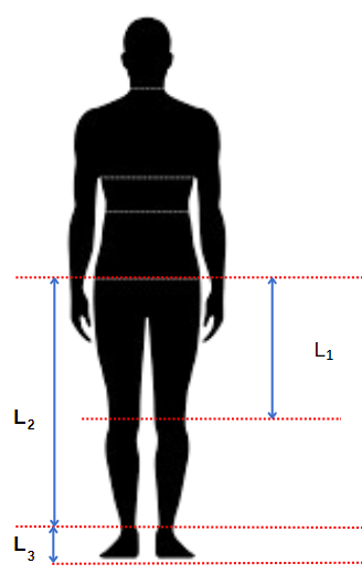
Figura 3. Medidas antropométricas del miembro inferior.
Fuente: Adaptado de https://depositphotos.com/es/vectors/icono-cuerpo-humano.html
2.2 Diseño Mecánico 3D del sistema robótico
El presente diseño mecánico del sistema robótico se basa en las medidas antropométricas del paciente,
centrándose principalmente en la biomecánica de cada articulación. Su objetivo es llevar a cabo una
rehabilitación adecuada de la rodilla y el tobillo como resultado de un accidente cerebrovascular
(25). Se empleó el software Autodesk Inventor Professional 2023 para
diseñar las partes de la estructura, que se divide en un soporte de sujeción de pierna y pie, similar al
exoesqueleto (18) en la que los resultados obtenidos se encuentran dentro
de los límites de resistencia permitida para la validación y selección de los materiales. Además, la
base del dispositivo está compuesta por un soporte y un riel del sistema, como se muestra en la Figura
4. Se planea prototipar este dispositivo utilizando impresión 3D en la siguiente etapa del proyecto
(26).

Figura 4. Diseño CAD del sistema de rodilla y tobillo.
Fuente: Elaborado en Autodesk Inventor Professional 2023.
2.3 Estructura cinemática del miembro inferior
El objetivo de la cinemática en un sistema robótico de miembro inferior es analizar la capacidad de
movimiento mediante la posición y orientación con valores de coordenadas articulares (27). La figura 5 muestra la representación geométrica del miembro inferior
del paciente.
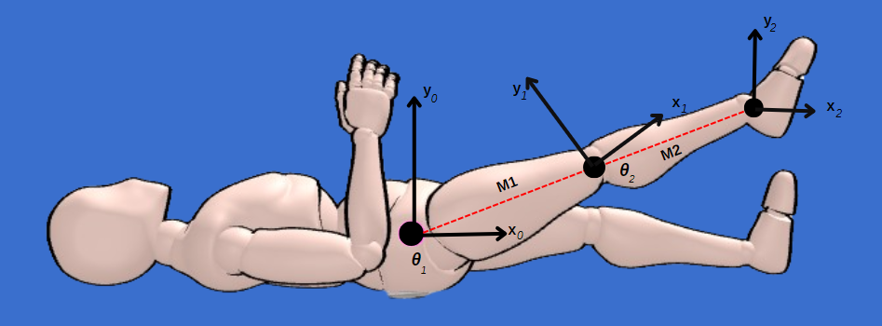
Figura 5. Estructura cinemática de miembro inferior.
Fuente: Elaborado en Just Sketch software.
En la Tabla 2 se muestra los parámetros geométricos del miembro inferior según la convención de
Denavit-Hartenberg (D-H) de acuerdo a los sistemas de referencias y dimensiones de la Figura 5 (28).
|
Link i |
ai |
αi |
di |
Ɵi |
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
1 |
M1 |
0 |
0 |
Ɵ1 |
|||||||||||||||
|
2 |
M2 |
0 |
0 |
Ɵ2 |
Donde:
i = representa el número de la articulación
ai =distancia a lo largo del eje xi
αi = ángulo entre los ejes zi y zi+1
di = distancia entre los ejes zi
Ɵi = ángulo entre los ejes xi y xi+1
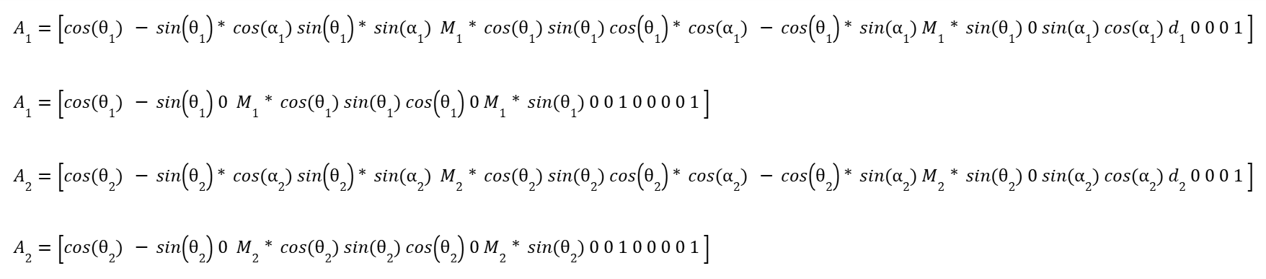
El modelo cinemático directo permite calcular la posición y orientación de la pierna en función de sus
ángulos articulares. Por lo que, es necesario calcular la matriz de transformación homogénea
Ai de cada articulación como se representa en la ecuación 1.

Sustituyendo los parámetros articulares de la Tabla 2 en la ecuación 1 se obtiene las siguientes
matrices:
Para obtener el modelo cinemático directo (posición y orientación del extremo) del miembro inferior es
necesario multiplicar las matrices A1 y A2. Por lo que, la matriz de
transformación homogénea que representa la posición y orientación está representada en la ecuación 2.

RESULTADOS
En la presente investigación se analizó los datos antropométricos de un paciente de 40 años de edad como
se muestra en la Tabla 3, con limitación de miembros inferiores a causa de un accidente cerebro vascular
con una altura de 170 cm y con un peso de 90 kg.
|
Extremidad |
Dimensión (cm) |
||||||
|---|---|---|---|---|---|---|---|
|
Muslo |
43.01 |
||||||
|
Pierna |
41.99 |
||||||
|
Pie |
6.63 |
Los resultados de la simulación realizado en Software Autodesk Inventor Professional 2023, como se
muestra en la Figura 6, indican que el sistema robótico cumple con los requisitos funcionales para la
rehabilitación y mejora de espasticidad de miembros inferiores en pacientes con accidente
cerebrovascular. Los movimientos de flexión máxima alcanzados (80° en cadera, 40° en rodilla y 20° en
tobillo) están dentro de los rangos terapéuticos establecidos, lo que sugiere que el dispositivo puede
ser eficaz en la mejora de los grados de movimiento en estos pacientes, mejora valorada mediante la
Escala de Asword modificada (29).
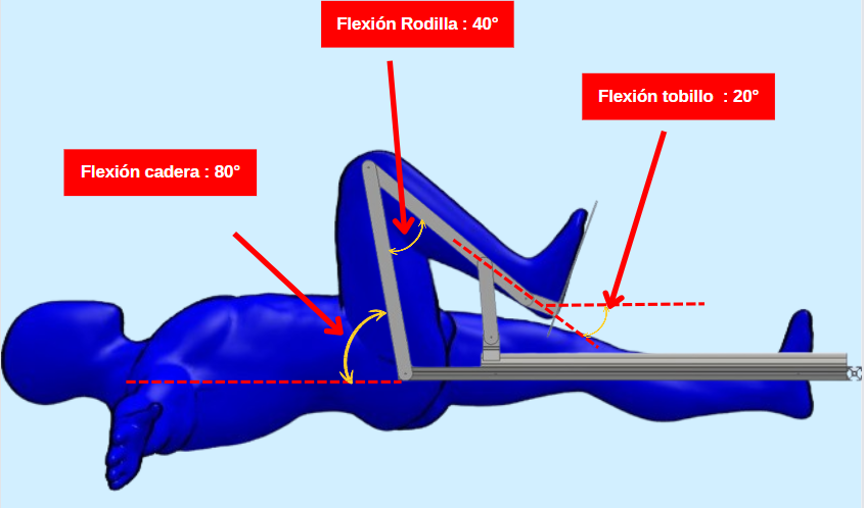
Figura 6. Simulación del sistema robótico en flexión.
Fuente: Elaborado en Autodesk Inventor Professional 2023.
Para la extensión de la rodilla, el sistema alcanzó con éxito los 180°, lo que representa una extensión completa. Este rango es fundamental para facilitar movimientos naturales y actividades diarias como caminar, levantarse y sentarse. La simulación mostró que el mecanismo de la rodilla es capaz de soportar la carga sin comprometer la estabilidad, lo cual es esencial para la rehabilitación efectiva. La precisión en la simulación sugiere que el sistema puede replicar movimientos fisiológicos con alta fidelidad, lo cual es esencial para evitar lesiones y maximizar la eficacia de la terapia. Además, la estabilidad del sistema bajo las condiciones de máxima extensión garantiza que los pacientes puedan utilizarlo de manera segura durante sesiones prolongadas de rehabilitación.
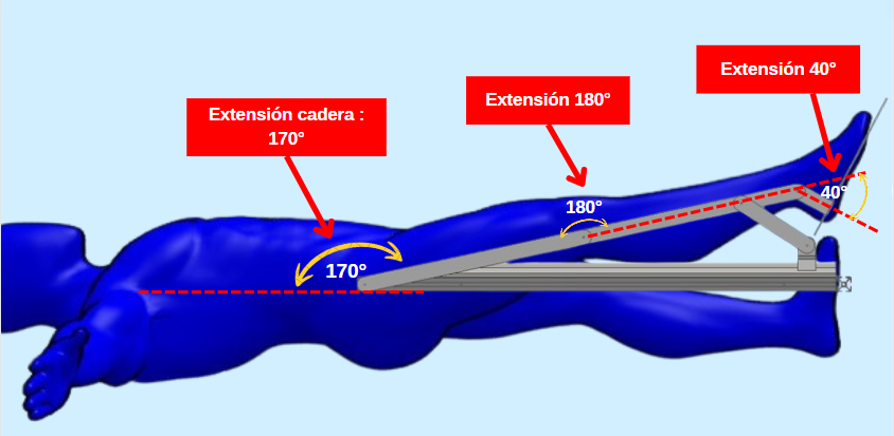
Figura 7. Simulación del sistema robótico en extensión.
Fuente: Elaborado en Autodesk Inventor Professional 2023.
Los ángulos de extensión máxima alcanzados en la cadera (170°), rodilla (180°) y tobillo (40°), como se
muestra en la Tabla 4, son adecuados para facilitar una recuperación funcional integral. Estos
resultados respaldan el uso de este sistema como una herramienta potencialmente valiosa en programas de
rehabilitación física, contribuyendo a mejorar la calidad de vida de los pacientes.
|
Extremidad |
Figura 7 |
Figura 8 |
|||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
|
Cadera |
80° |
170° |
|||||||||
|
Rodilla |
40° |
180° |
|||||||||
|
Tobillo |
20° |
40° |
La precisión en la simulación sugiere que el sistema puede replicar movimientos fisiológicos con alta
fidelidad, lo cual es esencial para evitar lesiones y maximizar la eficacia de la terapia.
CONCLUSIONES
En conclusión, la presente investigación demuestra que el sistema robótico médico (30) de miembro inferior ha sido diseñado con principios biomecánicos y
simulado con el uso del algoritmo Denavit-Hartenberg (D-H), demostrando que tiene el potencial de ser
una herramienta valiosa en la rehabilitación de pacientes con accidente cerebrovascular, al ofrecer
movimientos de rodilla y tobillo que son esenciales para la recuperación funcional. Además, las matrices
de transformación homogénea permiten realizar gráficas de desplazamiento y simulaciones del movimiento
de la pierna, proporcionando una mejor comprensión y control del proceso rehabilitador.
Los ángulos de extensión y flexión alcanzados por el sistema son adecuados para facilitar una
recuperación integral. La capacidad del sistema para mantener estos ángulos de manera estable y
controlada garantiza que los pacientes puedan realizar los ejercicios de rehabilitación necesarios sin
riesgo de lesiones, lo cual es esencial para una terapia segura y efectiva, mejorando así
significativamente la calidad de vida de los pacientes con accidente cerebrovascular.
Los resultados obtenidos no solo confirman la conceptualización de la viabilidad técnica del sistema,
sino que también abren la posibilidad de desarrollar prototipos reales y evaluarlos en entornos
clínicos, e incluso este proyecto tiene el potencial de poder ser utilizado en futuros viajes espaciales
donde se requiera la rehabilitación de miembros inferiores, ya que en ambientes de baja gravedad existe
un deterioro muscular (31). Como trabajo futuro, se propone implementar y
probar el prototipo, realizando evaluaciones de espasticidad en la Escala de Ashworth modificada antes y
después del uso del dispositivo, en un grupo de pacientes con ACV para validar su eficacia in-situ y
optimizar el diseño llevándolo a un modelo ergonómico. En la siguiente etapa del proyecto, la cual
involucrará el uso en personas, se contará con el permiso del Comité de Ética.
Contribuciones de Autoría:
C.M.C. y C.S. participaron en la conceptualización, investigación, metodología, análisis e
interpretación de datos, recursos y redacción del borrador original; J.B.A. participó en
supervisión clínica y aplicativa de resultados; R.P., M.M.M. y J.C. participaron en
supervisión y asesoría técnica, análisis e interpretación de datos; redacción del artículo;
revisión crítica del artículo.
Financiamiento:
El presente artículo es producto de la primera fase del proyecto de investigación “Diseño y
simulación de un sistema robótico de movimiento pasivo-continuo para la rehabilitación de
miembros inferiores para pacientes adulto con hemiplejia a causa de accidentes cerebro
vasculares (ACV)” aprobado con el Acuerdo de Consejo Universitario N°182-2024 y financiado
por el Vicerrectorado de Investigación de la Universidad Ricardo Palma.
Declaración de conflictos de intereses:
Los autores declaran no tener conflicto de interés.
Recibido:
15 de Mayo del 2024
Aprobado:
8 de Junio del 2024
Correspondencia:
Carol Sandoval.
Dirección:
Av. Alfredo Benavides 5440, Santiago de Surco 15039, Lima-Perú.
Teléfono:
(+51) 999661222
Correo electrónico:
keiko.sandoval@urp.edu.pe
Artículo publicado por la Revista de la Facultad de Medicina Humana de la Universidad Ricardo Palma. Es un articulo de acceso abierto, distribuido bajo los términos de la Licencia Creatvie Commons: Creative Commons Attribution 4.0 International, CC BY 4.0(https://creativecommons.org/licenses/by/4.0/), que permite el uso no comercial, distribucion y reproducción en cualquier medio, siempre que la obra original sea debidamente citada. Para uso comercial, por favor póngase en contacto con revista.medicina@urp.edu.pe.
